
It is well established that utilizing a mathematical framework to merge both model predictions and measurement data provides a more reliable and more accurate assessment than either of these techniques alone.
Schematic view of Model – Data Fusion process
Different algorithms exist in literature that are used to fuse model forecast information and observational data for better estimation of uncertain parameters. In general, these algorithms are divided into two major categories: Bayesian Inference Framework, and Minimum Variance framework.

Bayesian Inference vs. Minimum Variance Framework
As above figure shows, Bayesian Inference provides posterior distribution, given precise information regarding prior distribution of the variable of interest and also likelihood of observation data.
On the other hand, Minimum Variance framework provides posterior statistics (mean and covariance) of variable of interest, given prior statistics (mean and covariance) and also statistics of the associated noise in measurement data. However, there exist some restrictions regarding application of Minimum Variance framework in presence of nonlinear dynamical systems and/or nonlinear observation models.
Challenge of Noise Statistics
In both Bayesian Inference and Minimum Variance frameworks there is a crucial need for knowledge of statistics of associated noise in observed data. For instance, mean and variance of the noise are required in all minimum variance based methods. Similarly, in Bayesian inference framework, complete knowledge of noise signal distribution is needed to construct the likelihood function.
Toward a Noise – Independent Approach
A major challenge in model – data of dynamic systems is when there is no accurate information regarding the sensor error characteristics, i.e. there exists no accurate information about the statistics of the noise polluted in measurement data. This frequently happens in data assimilation of atmospheric incidents by using satellite imagery. This occurs due to the fact that satellite imagery data are often polluted with noise, depending on weather conditions, clouds, humidity, etc.
Unfortunately, there is no precise procedure to quantify the error in the recorded satellite data. Hence, using classical data assimilation methods in this situation is not straight forward. One way to proceed in this situation is to assume some statistics for the associated noise in measurement data and perform the estimation. However, depending on assumed values for noise statistics, obtained estimation results may not be as inclusive and accurate as it should be in reality.
There exist numerous works regarding data assimilation in absence of sensor error characteristics. The essence of these works is about the estimation of the noise statistics along with model-data fusion of dynamical systems. These works can be divided into two different categories: i) covariance estimation methods, ii) methods that estimate distribution of the associated noise in measurement data. Note that both these methods significantly increase the computational complexity involved in the whole model – data fusion process by introducing new uncertain parameters that need to be estimated.
Our Approach
The proposed approach is based on the premises that one should not make any assumption regarding the statistical properties of sensor data which are not available. In the absence of statistical information regarding the sensor data, we maintain the prior statistics but update the posterior mean to be in compliance with sensor data. This can be mathematically formulated as:
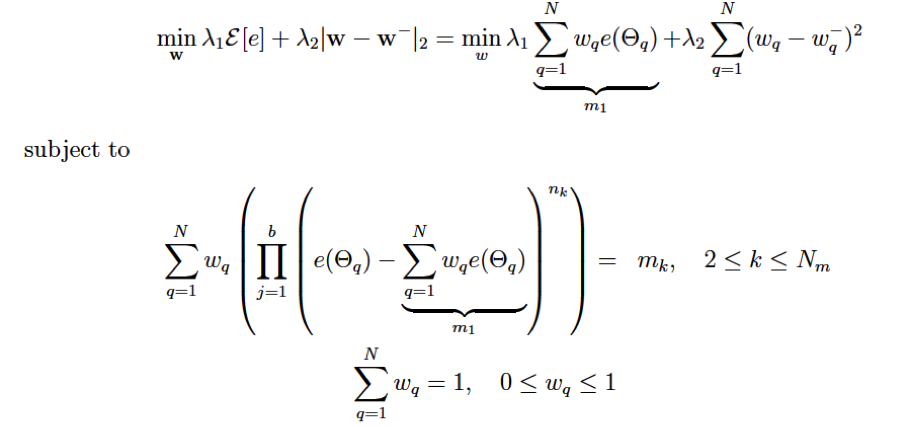
Schematic view of above optimization process is shown in below:
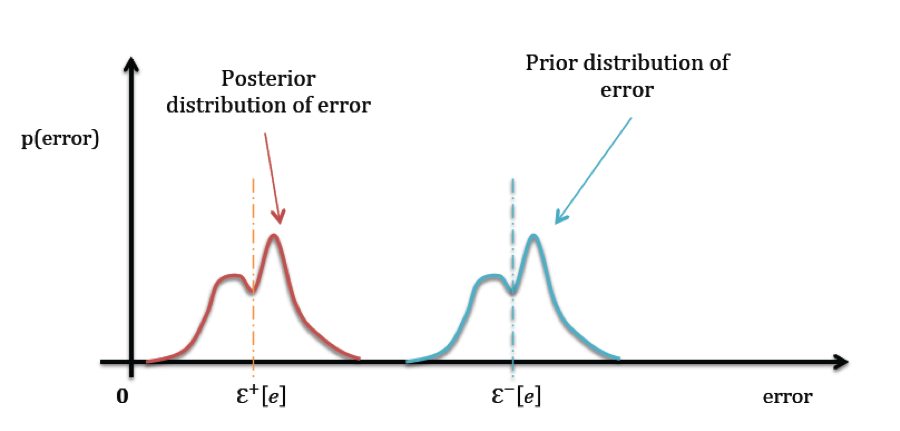
Schematic view of the proposed method used for model – data fusion. As illustrated, proposed technique minimizes expected value of the error while preserving shape of error distribution, i.e. higher order statistics of error distribution.Prior and posterior values of expected value of error ensembles are also shown in the figure.
